地図は作られたときから古くなる
言われてみると当たり前のことであるが、地図に表現されている道路や店舗は、明日その場所にないかもしれない。ほぼ毎日のように、どこかで新しいコンビニがオープンしたり、古いレストランが閉店したりするのが現実社会。それを地図に正確に落とし込むことは不可能ではないと考えているが、技術的にはかなり難易度が高く、実現した一般的な事例はない。地図業界では常識とされる「作られたときから古くなる」というフレーズも、利用者にとっては普段意識することはないだろう。むしろ自分のスマートフォンに表示されている地図はリアルタイムに更新されている、と信じ切っているのが現状ではないだろうか。
一方、MaaS(Mobility as a Service)という、近年世界各地で広がり始めている移動手段の技術革新によって、交通環境が変わりつつある。かつては個人所有の属人的なモビリティ利用か、既存の公共交通機関に依存した受け身であったものが、複数の移動手段を自由に組み合わせることが可能になった。そしてより便利に決済し、場合によってはユーザーではなく、店舗やサービス側が個人の要望に合わせて動的に街の中を移動する形態へと進化しようとしている。
人々はこれまで以上に都市空間を積極的に移動する。これらの将来を見据え、地図もまたMaaSのユーザーに合わせた動的な情報をどのように提供すれば、業界の常識を超える次世代のリアルタイム地図サービスを一般化できるか―。地図業界の末席に身を置く者として、現時点でのMaaSに耐え得る更新頻度を持った地図情報の共有手法と、今後の可能性について述べる。
一般的な地図作りのフローを確認しよう。現代の地図はまず精度の高い専用の測量機器を用いた座標の計測から始まる。特に公共測量と呼ばれる測量法に則った精度を保証する計測方法によって、日本の地図精度は世界的に見てもかなり絶対精度の高い閾値が設定されており、1/1000前後の大縮尺地図が整備されている稀有な国である。一方でこの精度を保証するための品質検査プロセスは複雑であり、結果的に更新頻度を高めるという目的の下では、足かせとなっている点は否めない。このような公共測量による成果は測量法に則り、申請ベースで比較的自由に商用利用が可能になる。これらをもとに大手の地図調製会社では、足りない情報や表現の付与が行われ、各社独特のデザインと利便性を持った多様な地図が出来上がる。例えばゼンリンは、これらの基盤地図をベースに独自の調査員を現地調査に向かわせ、公道から確認可能な限り表札情報を地図に付与して住宅地図として調製を行う。店舗情報やマンション名など、現地調査を行わないと取得できない地図情報が多々存在し、これらの情報収集の効率化は現時点においても大きな課題である。
このようなプロセスを要するため、伝統的な日本における地図情報の更新は早くても1年のインターバル、地域によっては5年に1回程度の更新頻度が一般的であった。これらのデータを購入してウェブ地図サービスを展開しているサービスプロバイダ各社も、この更新頻度をさらに向上させるために、独自に大規模な開発の状況や道路開通情報を収集。地図データを更新しているが、それでも数カ月に1回程度の更新が壁となっている。
この更新頻度の向上を目的に、各社が取り組んでいるのが次世代型のリアルタイム地図である。ここでは、今までの数カ月に1回程度更新される地図と区別するとともに、さらに2つの段階、「準リアルタイムマップ」と「リアルタイムマップ」の2つの時間軸について議論していこう。
前者は地図更新頻度が数時間から数日程度の地図、後者は数秒から数分程度で更新可能な地図として技術アプローチが大きく異なる。MaaSにとって本当に必要な地図の更新頻度は後者のリアルタイムマップであることは間違いない。しかし現時点では、十分にサービス提供できていない状況を補完する意味でも、準リアルタイムマップとリアルタイムマップを組み合わせた、ハイブリッドな地図情報の共有が最適解ではないかとも考えている。今までのウェブ地図を支えてきた技術を踏まえて、その先の未来を想像してみよう。
GPSの登場
もはや知らない人はいないくらいに一般化した衛星測位システムであるGPS(Global Positioning System)は、元々米軍が開発した軍事技術が一般開放されたことから普及した。特に、米国政府によってクリントン政権下の2000年を境にして、意図的に約30m精度に下げていたSAと呼ばれるGPS信号劣化処理が米国大統領令によって解除され、水平方向で誤差数mの現在地特定ができるようになった。軍事技術がパブリックドメイン化されたことで、国や人種、性別問わず、誰もが最先端の測位技術を利用できるオープンな仕組みが定着し、すべての人がGPS端末を持ち、誰でも簡易に測量行為を行うことができ、それまで考えられなかったような多彩な地図サービスを高度に発展させる時代へと突入した。つまり専門教育を受けずとも、いつでも誰でも伊能忠敬のように測量を行えるようになったのだ。
その結果、自分の位置をもとに気軽に地理空間情報を作り、チェックインサービスや写真に対する位置情報付与(ジオタギング)など、多くの友人や不特定多数の人々とシェア(共有)する文化が生まれた。合わせて、モビリティとしての自動車、公共交通機関、二輪車や、今後普及してくる自動運転を前提とした社会サービス、街なかを移動するUAV、UGVといったロボットらが、これらの測位技術と地理空間情報を活用することで、より高度な地理空間情報社会サービスを提供する時代はすぐそこまでやってきている。そしてその本質は、約20年前に政治的判断によって公開された米国のGPSサービスが存在しなければなし得なかったといえる。その後、米国製技術の依存から脱するために、ロシアのGLONASS、中国の北斗、欧州のGALILEO、そして日本の準天頂衛星ら類似のGNSS(Global Navigation Satellite System/全球測位衛星システム)サービスが生まれ、あっという間に100機以上の測位衛星が上空を飛ぶ時代へと突入した。また、その精度も条件が良ければ単独精度でサブメートル(1m未満)級の位置計測がスマートフォン1つでできるようになり、無意識のうちにスマホ片手に測量行為を行う、“一億総伊能化社会”が成熟しつつもある。
共創(クラウドソーシング)のチカラ
先に述べた準リアルタイムマップを実現するために、2004年に英国・ロンドン大学の大学院生SteveCoastが始めたプロジェクトがOpenStreetMapである。当時は、インターネットの世界ではWeb2.0というバズワードとともに、WikipediaやYouTubeといったユーザー投稿型のコンテンツ・サービスがクラウドソーシングとして普及した時期でもある。米国や日本などでは、国が整備したデジタル地図コンテンツがNSDI(National Spatial Data Infrastructure)として、パブリックドメインもしくは申請ベースで、比較的自由に利用することが可能であった。一方、欧州各国では英国を中心に政府機関の地図データの利用に関しても有償で、二次利用の制限が問題視されていた。そこでそれを市民のチカラで乗り越える試みとして、GPSロガーを片手に街なかを闊歩し、自転車を乗り回し、その軌跡をもとに地図を描いていた。この草の根のクラウドソーシングによる地図作りがOpenStreetMapとして2008年に世界的に認知され、その情報提供者と利用者がコミュニティとして爆発的に拡大したのだ。
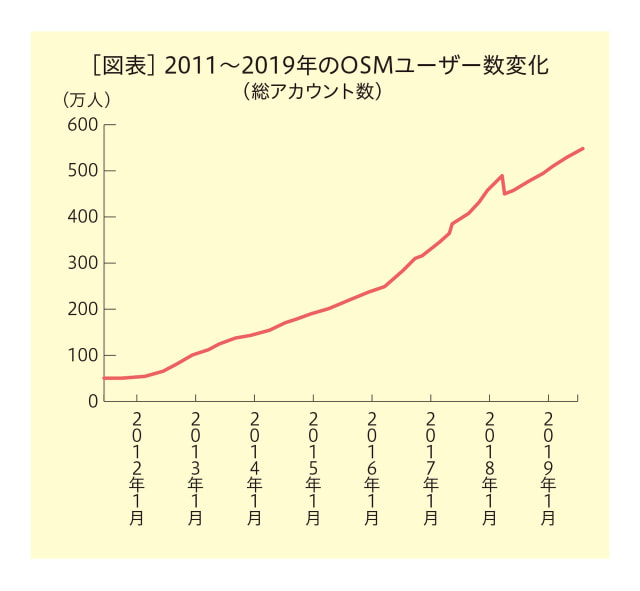
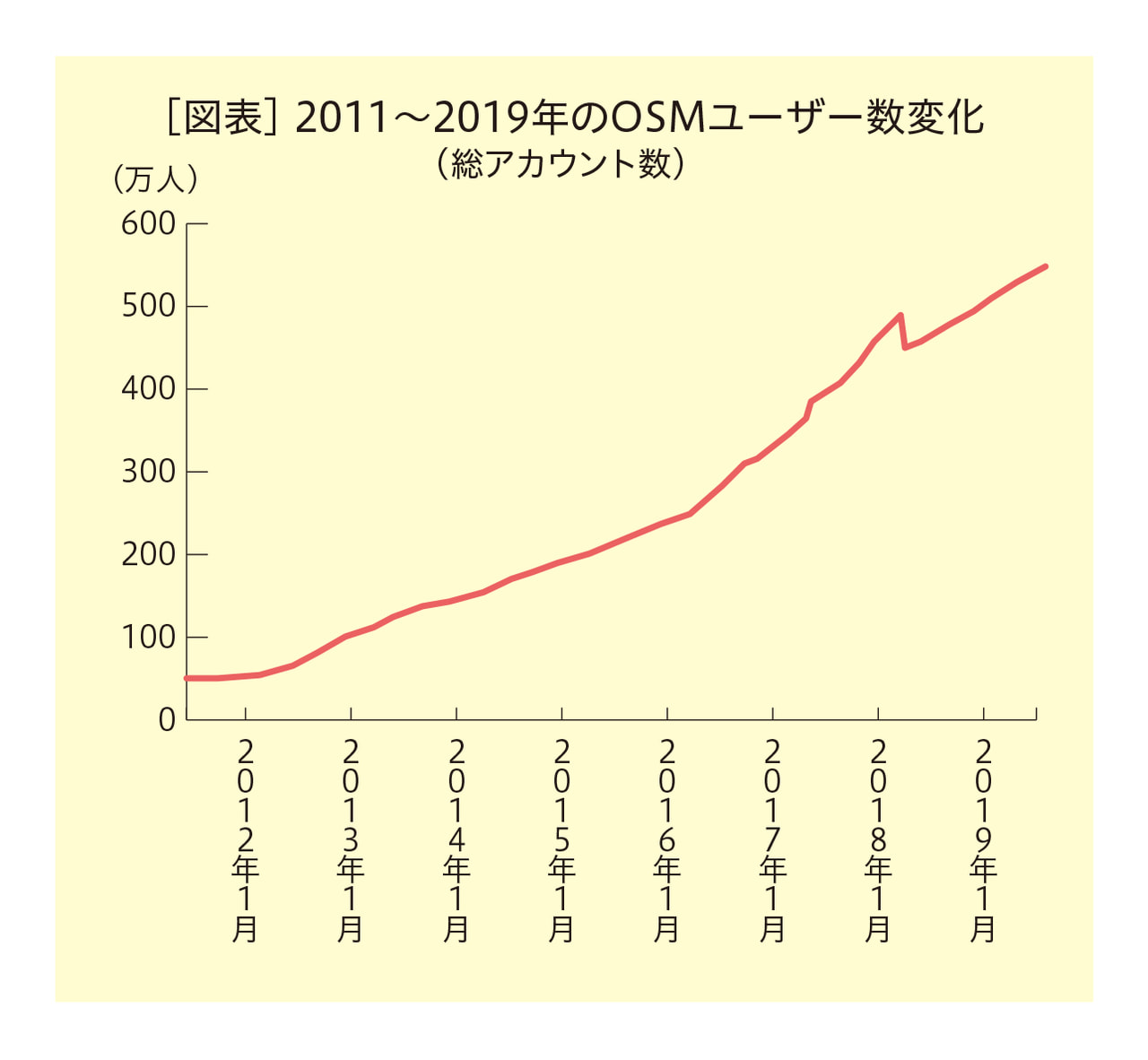
2019年8月の時点では、地図編集作業の参加者は延べ約560万アカウント。国連加盟国193カ国中、人口114位のフィンランドを超える規模のコミュニティとなっている[図表]。この規模の市民の共創に呼応するように、MicrosoftやMAXARといった衛星画像提供企業が衛星画像のトレース許諾を中心としたさまざまな活動で支えた。作成された地図データが許諾不要で商用利用可能なオープンデータとして公開されたことによって、約10年間でGoogleマップに並ぶ、大規模なウェブ地図サービスのエコシステムを作り上げた。2012年のApple、2017年のPokémon GO等のGoogleマップ離脱とOpenStreetMapの採用は、必ずしもGoogle一強ではないこの業界の実情を端的に示している。2019年現在、OpenStreetMapは数時間から数日程度で地図情報を更新可能な、準リアルタイムマップを実現する最有力候補としてその地位を固めつつある。
スマートフォンができること
誰もがGPS/GNSSを普段使いできるという今の社会を作ったのは、急速に普及したスマートフォン端末の存在が大きい。もちろん標準デバイスとしてのスマホにGPS/GNSS機能が内蔵されているというだけではない。それを活用したさまざまなアプリ、いつでもインターネットにつながる通信インフラの一般化、そして高品質なカメラや方位センサー、ジャイロスコープ、加速度センサーといった位置情報推定に活用可能なセンサー類の充実によって、ユーザーが取得し共有することができる地理空間情報の高度化が、共創をさらに後押ししている。
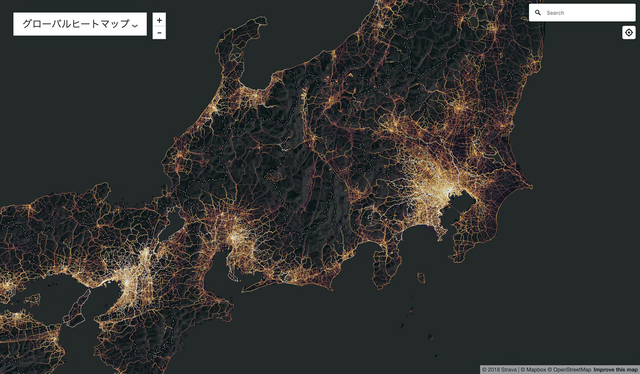
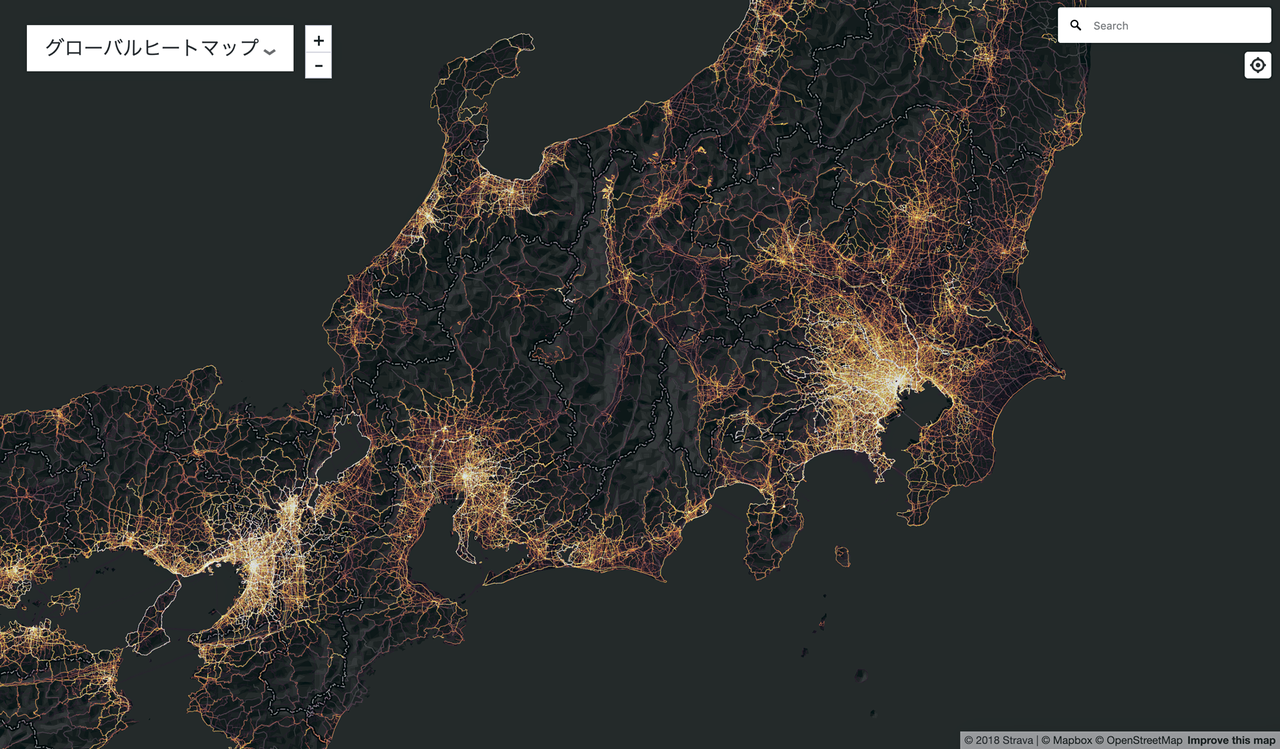
例えば、一昔前では専用のGPSロガーがその役目を背負っていた移動の軌跡記録は、Stravaを代表とするジョギングやサイクリングなどのアウトドアスポーツ活動の記録用のスマホアプリとして普及。Apple Watchなどのウェアラブル端末との親和性も高まってきている。またFacebook MessengerやSnapchatといったSNSチャットツールには、プライバシー問題に配慮する形で、利用者同士の現在位置が時限制限付きながらリアルタイムで共有できるようになった。GoogleのStreet Viewなどは、特殊な360°カメラを所有していなくても、ユーザーが四方八方にスマホのカメラを向けて撮影するだけで、高分解能の360°パノラマ写真を共有することも可能だ。
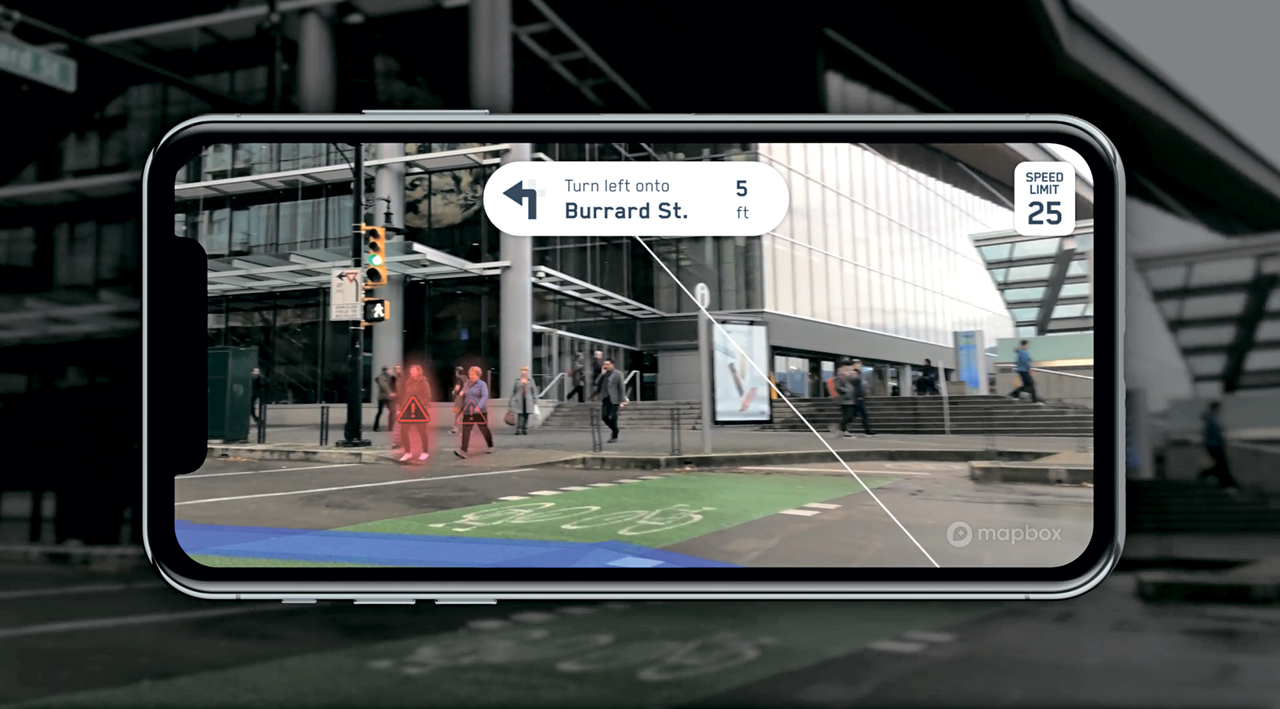
スマートフォンによるナビアプリは初期の頃から各社がその機能拡張に熱心に取り組んできたが、一例としてMapboxが開発しているVision SDKは、埋め込み型の標準ナビ以上の機能をアプリとして実装でき、内蔵カメラで撮影された景色から機械学習技術を用いながらリアルタイムにオブジェクト抽出とSfM(Stracture from Motion)技術による三次元特徴点抽出を行う。さらにレーン認識や歩行者認識まで実現したARナビゲーションなど、人と自動運転モビリティの世界にまさにAIナビのような、人間の代わりとなり得る次世代のナビゲーションサービスが一般化する時代がいよいよ近づいてきた。

Googleマップの進化とGTFS
2019年3月に突如発表されたGoogleマップからのゼンリンデータ離脱は、業界関係者のみならず一般ユーザーにも衝撃を与えた。特に、ゼンリンデータの代替手段として選んだ地図データが、Street ViewやGoogleマップユーザーの移動履歴(プローブ)をもとにしたGoogle独自作成のグランドトゥルースデータであることから、一方ではその品質と、一方では今後のGoogleの方向性が議論され、メディアでも騒がれた。
今回のデータ変更の大きな目的は、一言でいうとGoogle流リアルタイムマップの仕組みを実装することであろう。そのために、一時的には高品質なゼンリンのデータよりも信頼性の低いデータとなることは覚悟の上で、今までの利用規約上日本国内では利用できなかったオフラインマップ機能や、数日で変化を反映させる準リアルタイムマップとしての一般図、そして渋滞情報や事故情報など重要な主題図に絞ってリアルタイムマップを組み合わせようというものである。しかも、グランドトゥルースデータの元データである360°パノラマ画像やLiDAR点群データ、衛星画像や航空写真といった、文字どおり大量のビッグデータを自動処理し、OpenStreetMapでは実現できていないレベル(例えば建物形状のフットプリント網羅など)での地図データの自動生成プロセスに着手することになる。これを世界で最も品質にうるさい国で始めたことは、Google側の本気度を示している。
同時にグルメガイドを中心とした店舗情報では、Google Local Guideと呼ばれるユーザー投稿型のPOI(Point of Interest)地点データが、時間帯ごとの混雑状況まで含めて整理され、リアルタイムマップ情報として付加価値を高めている。Googleは必ずしもすべてを自分たちで構築するのではなく、ユーザーとの共創バランスを適宜調整しながら、過去の失敗事例であるGoogle Map Makerを反省材料とし、最終目標であろうリアルタイムマップの実現に相当な力を注いでいることが見受けられる。その一例として公共交通機関の乗り換え情報を提供するGTFS(General Transit Feed Specification)形式のオープンデータフォーマットを充実させている点も、リアルタイムマップの実現を後押ししている。GTFSはCSV形式の一般的なスプレッドシート構造でバス停の位置、ルート、時刻表といった交通機関のさまざまな情報を整理して格納。このGTFSデータを使って、GoogleはGoogleマップの乗換案内アルゴリズムに採用されるトップダウンとボトムアップを組み合わせた共創スタイルで、世界中の公共交通機関情報を収集している。GTFSには通常運行用の静的GTFSと遅延や運休情報、車両位置も反映可能なGTFS-realtimeの2種類があるが、後者は公共交通機関のリアルタイムマップ実現を支えていく地理空間情報のデータ基盤となるであろう。
地図作成の自動化というチャレンジ
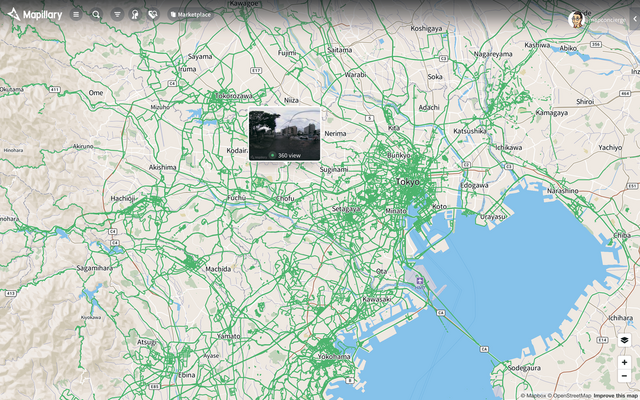
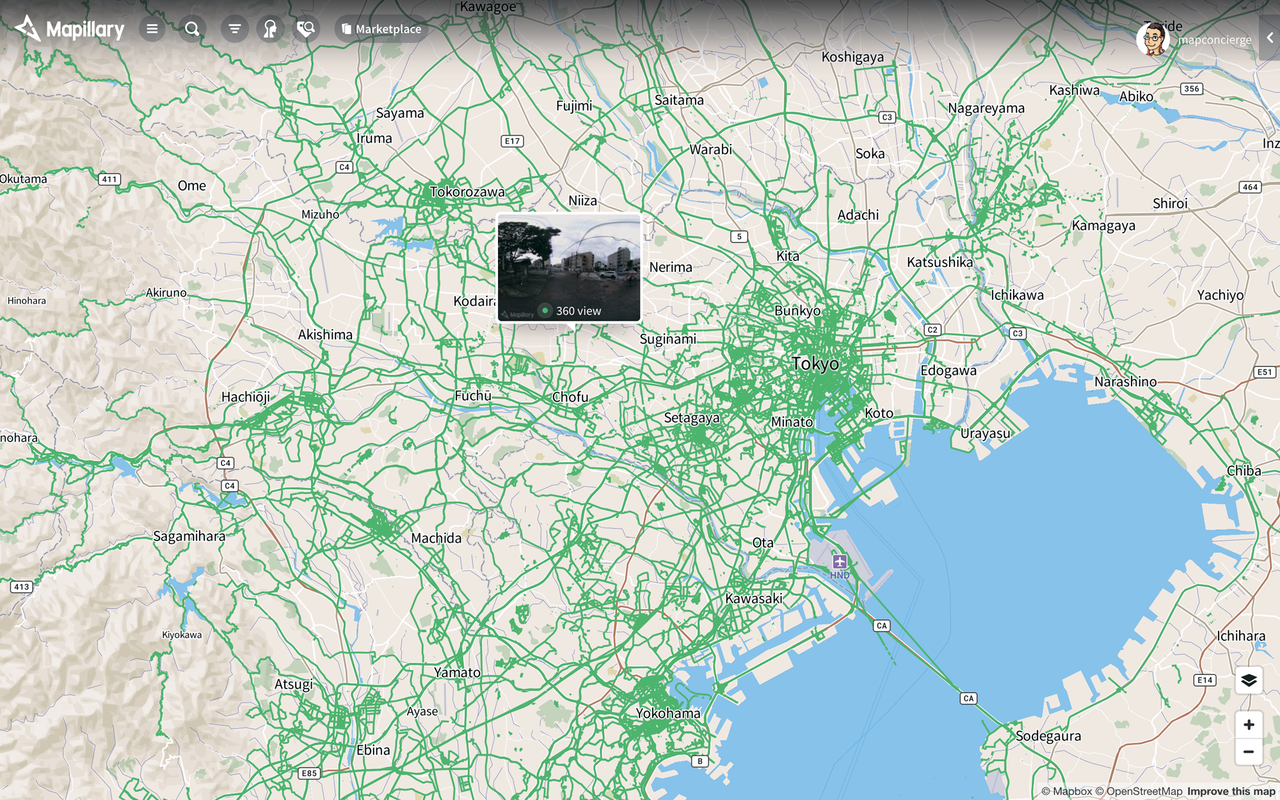
MaaSが当たり前の世の中が来る頃には、Googleマップのようなリアルタイムマップの自動生成アプローチはGoogleに限らず、MaaSに関わるほぼすべての事業者が関わり、取り組んでいくことになるであろう。先のMapbox Vision SDKもその先鋒であるが、もう一つ着目すべき視点はドライバーや歩行者目線のGround Level Imageryの整備である。Google以外にもMicrosoft、Appleらは独自のMMS(Mobile Mapping System)を走らせ、同様のStreet Viewライクなパノラマ画像とLiDARデータの収集に励んでいる。日本ではダイナミック基盤(株)が代表的な日本企業を中心に、各社と自動運転モビリティ向けの高精度な三次元地図サービスを提供しようと取り組んでいる。地図作成の自動化に取り組むプレーヤーは自動運転に関わる企業と、測量・地図調製企業、そしてGAFAと呼ばれるウェブサービスプロバイダー大手。これらが入り乱れ、デファクトスタンダード争いは今後激化していくと思われる。一方でこの分野で共創という視点を取り入れているのがMapillary AB社が2014年から取り組んでいる「Mapillary」である。「Mapillary」は専用のスマートフォンアプリで地上からの景色を撮影するほか、各種360°カメラにも対応しており、ユーザー参加型のStreet Viewライクなサービスとして急成長している。2019年8月現在、許諾不要で商用利用可能なオープンデータライセンスで共有されている写真は6億枚を超え、個人だけではなくMicrosoft等の企業も撮影データを提供するなど、OpenStreetMapの歴史をなぞるようにその影響力を高めてきている。これらの膨大な写真データはポストプロセッシングとして処理されるため、リアルタイムマップ生成への寄与は難しいが、早ければ数時間で公開され、準リアルタイムマップ生成には大きな力となる。例えば2019年8月現在でMapillaryが自動検出可能なオブジェクト数は97種類。交通標識の細かな分類は1,500種類がマッピング可能である。またSfM処理による三次元点群データ生成と組み合わせて、OpenStreetMapデータの更新作業にも大きな情報源となっている。現時点では自動検出された地物をOpenStreetMapに反映させるには人間の判断が必要だが、このプロセスがより高度化されることで、OpenStreetMapデータの自動生成は手の届くところまで来ている。
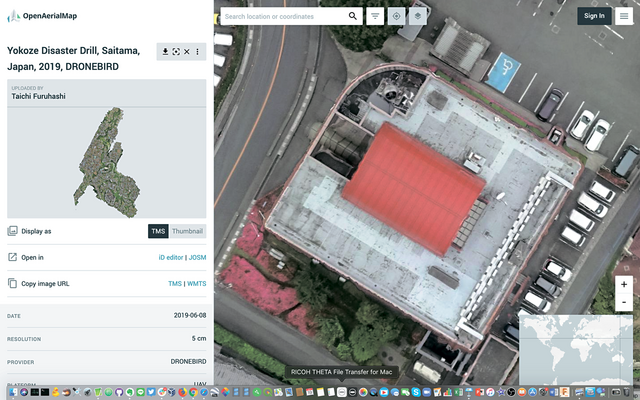
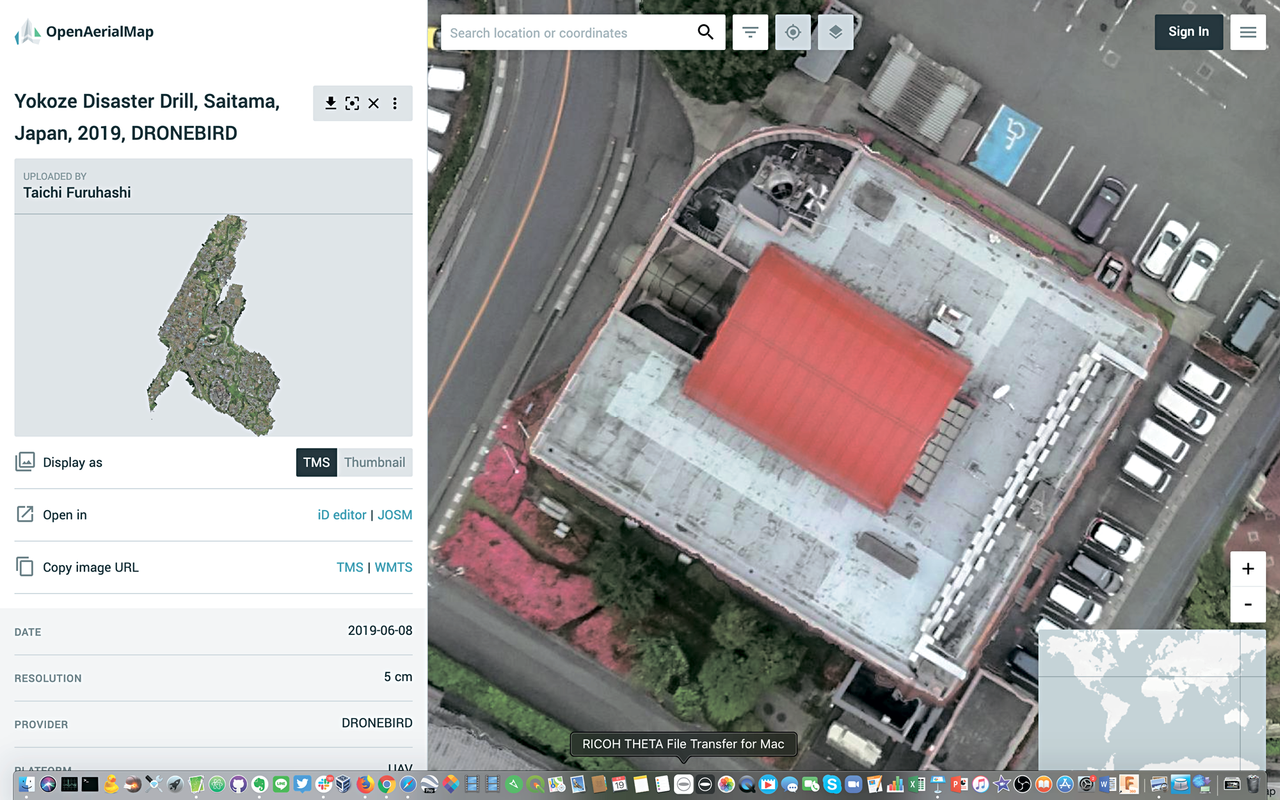
もう一つ、別の視点で地図作成の自動化に取り組んでいるのがFacebookだ。2017年からFacebookは衛星画像を用いた自動地図作成にチャレンジしており、最初の1年間はタイ国内の道路中心線データを機械学習による画像認識技術を用いて、ほぼすべての道路で抽出。既存のOpenStreetMap道路データと比較し、新規抽出分だけを追加するプロセスで、約1年間で約60万本の道路データ構築を成し遂げた。そして、その作業プロセスを効率化し、対象エリアを拡大させつつも、2019年7月には自動地図作成機能が実装された新しいOpenStreetMap地図エディタRapiDを発表した。現在使用している地球観測衛星は毎日撮影できるものではなく、ましてや数時間間隔で撮影されているデータは利用されていないが、Planetをはじめとした複数機の地球観測衛星コンスタレーションを活用することで、数年以内に衛星画像の撮影頻度は1日数回の準リアルタイム撮影が一般化することを期待する。もしこれらのコンスタレーション画像がFacebookの自動地図作成機能で利用可能になると、準リアルタイムマップデータの自動作成は現実化し、加えて低高度で雲の下を飛ぶ空撮ドローン撮影を組み合わせることで、リアルタイムマップ作成の可能性すら見えてくる。現在の共創という視点では、まずは災害時のように迅速に最新の空間情報が必要な条件から実装が進んでいくと思われるが、OpenAerialMapなどの空撮画像共有プラットフォームも機能し始めていることから、それぞれのチャレンジしてきた技術が組み合わさることで、地図作成の自動化はそのゴールが見えてきている。
サービスの最適化につなげるには
最後に、準リアルタイムマップとリアルタイムマップが実現することで、MaaS前提の社会をどのように支えていくのか、その未来像について触れたい。そもそもなぜMaaSを考えていく上でGoogleマップだけでは不十分なのだろうか。別の問い方をすれば、なぜPokémon GOはGoogleマップから離脱してOpenStreetMapに切り替えたのか。なぜ、TeslaやUber、Grab等はナビゲーションのアルゴリズムにGoogle Maps APIではなくOpenStreetMapを選んだのか。これはまさにサービスの最適化を実現していく上で、地図データの中身を制限なく扱えるオープンな仕様が必要不可欠であるからといえる。筆者の推測であるが、単純なA地点からB地点への最短経路を求めるにはGoogle Maps APIでも十分であろう。しかし細かなナビルートの最適化を考えると、Googleがはじき出す結果とTeslaの車が移動するのに最適なルートが完全に一致することは少ない。Uberはさらに、途中経路も含めて動的に適切なルートを求める必要がある。このようなユーザーに合わせた細かなカスタマイズをするためには、地図データの中身をじっくり扱えて、自由に利用可能なOpenStreetMapが向いている場面が多くなったのであろう。またPokémon GOでポケモン同士を戦わせるジムを発生させるアルゴリズムには、その場所が児童遊園や公園といったある程度の人数が収容可能な場所であることを判断した上で自動的に生成させているように見受けられる。このような特定の地図データオブジェクトを抽出して二次利用する視点では、一般的な地図サービスであるがゆえに、特定の目的に特化しにくいGoogleマップよりも、より最適化をしやすいOpenStreetMapスタイルが好まれているのであろう。事実、TOYOTAとソフトバンクが推し進めているMaaS型の新サービスMONETでは当初から地図サービスにはOpenStreetMapをベースとしたMapboxの利用が発表されており、2019年9月にはゼンリンのデータも組み合わせた利活用が開始される。Googleも同様に二次利用可能な幅を広げる戦略を展開するはずだ。
いずれにしても、これからのMaaS前提社会における準リアルタイムマップとリアルタイムマップをハイブリッドに組み合わせた地図サービスはOpenStreetMapであれ、Googleマップであれ、より多様な目的にカスタマイズ可能で、すばやく更新できる、人々とモビリティの移動をより安全に効率よく支援するための地理空間情報基盤として機能していくプラットフォームとして寄与していくものと考える。