はじめに
私は、人間の認知的な特性を踏まえた上で、人と人工物との関係を観察し分析する研究に取り組んでいる認知科学者です。「人間の認知的な特性」と表現してしまうと非常に堅苦しく聞こえますが、「人間の思考や判断におけるクセ」と思っていただいて大丈夫です。地球上で唯一の高度な知性を持つ生物だと考えられがちな我々人間ですが、その思考や判断は実はかなりいい加減です。例えば、目の前で目撃した出来事がどんなに珍しい現象であっても、それを典型例だと信じ込む傾向があります(例:うちの祖母は現在100歳だが喫煙者である。よって喫煙が肺ガンを引き起こすのはデマである)。
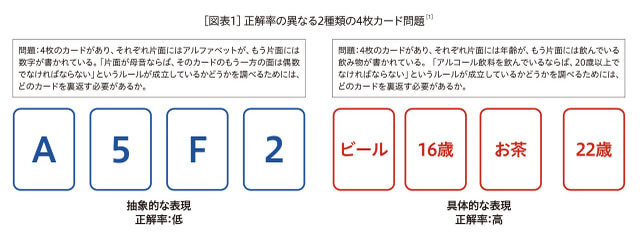
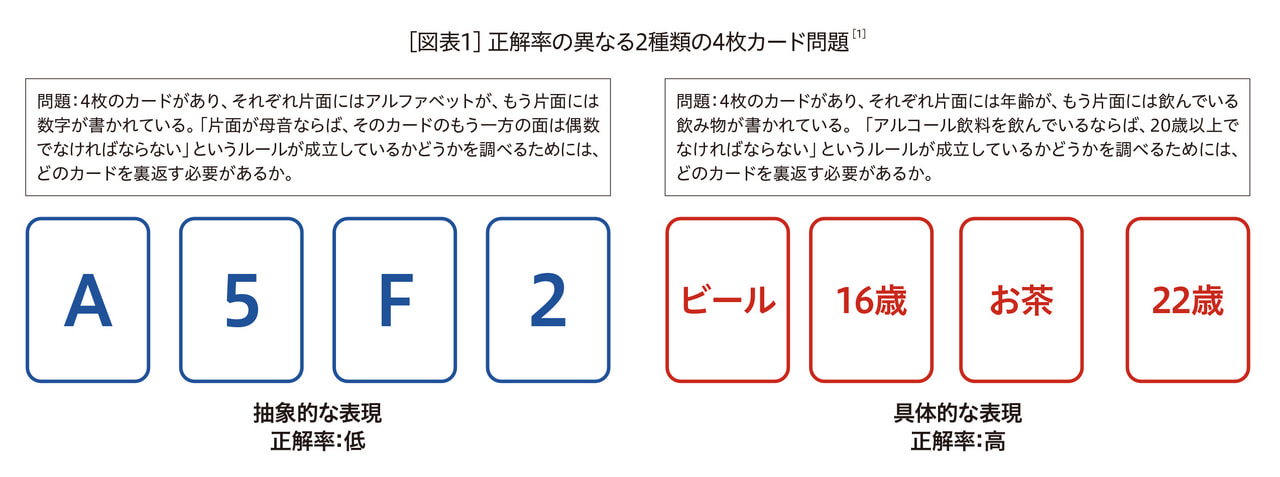
さらに、同じ構造を持つ問題であっても、その表現の仕方が具体的だとその問題の正解率は高いものの、抽象的だとその正解率は低くなる傾向もあります[図表1]。もし人間が、論理的な思考を生得的に有していれば、これらの問題の正解率は変わらないはずなのですが。このような人間の認知的な特性(=思考や判断のクセ)は我々人間が進化の過程で培ってきたものだといわれており、現在社会における我々の思考や判断にも大きな影響を及ぼしています。
さて、そのような認知的な特性に着目して、人と人工物との関係を観察し分析している私の研究について紹介させてください。現在興味のある問題の一つが、情報機器とユーザとのインタラクションで必ず生じる「待ち時間」です。どれだけインターネットが高速化しようと、どれだけ情報機器が高性能化しようと、私たちは情報機器の作業終了を「待つ」ことからは逃れられません。
アプリのインストール、ファイルのダウンロード、帯域制限中のWebページの読み込みなど、私たちが情報機器の作業終了を待つという状況は日常的に頻発しています。このような「待ち時間」を解決する方法としては、インターネットの高速化や情報機器のさらなる高性能化という情報機器側に対する工学的なアプローチがまず考えられます。
その一方で、人間の時間知覚の特性を利用した上で、逃れることができない待ち時間を「主観的にできるだけ短く感じさせる」というアプローチも可能だと考えられます。そこで私の研究室では、ユーザがその待ち時間を短く感じることができるような情報機器からの情報提示手法を探究するプロジェクトを進めています(興味がありましたら、これらの研究をチェックしていただけると幸いです [2][3])。このように人間の認知的な特性というものをしっかりと把握することで、現在の人間と人工物との間に存在している数々の問題を、いわゆる工学的手法に依存しない方法で解決できるのではと私は考えています。
私たちがロボットに望むもの
そんな私にとって、現在最も興味のある問題が、「なぜロボットは日常生活に普及しないのか」という大問題です。世界最初の産業用ロボット「UNIMATE」が開発されたのが1960年初頭ですので、それから約60年という月日が流れています。その当時のUNIMATE のデモンストレーションビデオでは、UNIMATEが工場で稼働する様子のみならず家庭内で紅茶をサーブしたりシャンパンを開けたりする動作を見ることができます(1)。つまり60年以上も前から、ロボット技術者はロボットを家庭で使用することを目指していたのではないでしょうか。
では現在、私たちの日常生活空間にどれだけロボットは普及しているのでしょうか。床掃除ロボットは最近徐々に普及しつつありますし、ファミリーレストランなどでは注文した料理をテーブルまで搬送するロボットを見かけるようになりました。そして、ペットロボットを実際にお持ちのご家庭もあるかとは思います。しかしこの現状は、「ロボットは私たちの日常生活に普及した」といえるのでしょうか。
私たちの生活に普及した最先端の技術といえば、スマートフォンがその代表例でしょう。スマートフォンに関しては、ほぼ全ての人が持ち歩き、メールやメッセージの送信のみならず、写真や動画の撮影、動画や映画の視聴、さらにはさまざまな支払いに使用するなど、今や我々の日常生活にはなくてはならない存在です。また自動車の自動運転も、かなりのスピードで社会に普及しつつあります。よって、スマートフォンや自動運転などの技術はすでに日常生活に普及しているといえるのではないでしょうか。
この現状と比較するとやはり、ロボットはまだまだ日常生活には普及してはいないといえるでしょう。その普及を妨げる原因としては、さまざまな要因が挙げられます。パッと思いつくだけでも、「値段が高い」「物理的に場所をとる」「キラーアプリケーションがない」などを考えつくことができます。
しかし、もしこれらの要因によってロボットの普及が妨げられているのが明らかであれば、これらの問題はすでに優秀なロボット技術者によって解決されているのではないでしょうか。
そこで私は現在、ロボットの日常生活への普及を阻んでいる一番大きな要因は、「我々人間自身」なのではという仮説を立てています。つまり、ロボットという存在を拒絶するような思考や判断のクセが人間に存在しているのではと考えているのです。
人間は感覚器官からの情報や既有の知識を用いて、常に外部環境や対象についての予測を立てながら行動しています。この予測のことを認知科学では「内部モデル」と呼びます。私たちはインタラクションの対象についても、その見た目や自らの経験などに基づいてその対象の内部モデルを構築し、このモデルに基づいてインタラクションの方略(=どのようにインタラクションを行うのか)を決定しています。インタラクションの対象が犬であれば、私たちはこの対象に犬らしい動作を予測して、「お手」といって犬の右足に向けて手を差し出すでしょうし、その対象がお年を召した方であれば、大きめの声でゆっくりと話しかけるでしょう。
では、私たちは「ロボット」に対してどのような内部モデルを構築しているのでしょうか。このロボットに対する内部モデルをしっかり把握することで、「我々人間自身」がロボットを拒んでいるという仮説が検証できるのではと考えています。
そして現在、私の研究室では、人間はロボットをどのように認識し、どのような内部モデルを構築しているのか、という点に着目したさまざまな調査や実験を行っています。この機会をお借りして、それらの試みを2つ紹介したいと思います。
ロボットと人間を分ける道徳的規範
調査その1:トロッコ問題状況に置かれたロボットに求めること、そしてその判断への評価
「トロッコ問題(Trolley Problem)」は1967年にイギリスの哲学者Footによって提案された人の道徳的直観を観察するための課題です。このトロッコ問題は、さまざまな道徳的な価値観が存在しうるという、いわゆるモラルジレンマ状況に置かれた人が、最終的にどのような結論を導き出すのかを把握する目的で提案されたものです。ですので、「この状況ではこう行動するべき」などという正解が存在するわけではありません。具体的には、以下のような課題です。
1人の男が線路脇に立っていると、暴走列車が自分に向かって突進してくるのが目に入る。ブレーキが故障しているのは明らかだ。前方では、5人の人たちが線路に縛り付けられている。何もしなければ、5人は列車にひかれて死ぬ。幸い、男の傍らには方向指示スイッチがある。そのレバーを倒せば、制御を失った列車を目の前にある分岐線に引き込める。ところが残念ながら思いがけない障害がある。分岐線には1人の人が縛り付けられているのだ。列車の進路を変えれば、この人を殺す結果になるのは避けられない。どうすればいいだろうか?
2015年、アメリカ・ブラウン大学の認知科学者であるMalle教授らは、このトロッコ問題にロボットを登場させることで、我々人間は「ロボット」に対して人間とは異なる道徳的判断を求めていることを明らかにしました [4]。具体的には、方向指示スイッチの横に人間の作業員がいる場合、もしくは作業用ロボットがいる場合、そして実際にその作業員もしくは作業用ロボットがレバーを倒した場合(列車を分岐線に引き込んだ場合)、もしくはレバーを倒さなかった場合(列車がそのまま直進した場合)を組み合わせた合計4種類のシナリオを用意しました(人間の作業員がレバーを倒した場合、人間の作業員がレバーを倒さなかった場合、作業用ロボットがレバーを倒した場合、作業用ロボットがレバーを倒さなかった場合)。
そして、この4種類のシナリオのうちいずれか1種類を読んでもらい、「その作業員もしくは作業用ロボットは、どのくらいの非難に値すべきなのか」を0(全く非難されるべきではない)から100(最大限非難されるべき)までの数値(非難度)で回答してもらうというアンケート調査を実施しました。その結果、レバーを倒すという判断をした作業員と作業用ロボットへの非難度には差はありませんでしたが、レバーを倒さないという判断をした作業員への非難度は低い値を示した一方、同様の判断をした作業用ロボットへの非難度は高い値を示し、その差は統計的に有意なものであることが確認されました[図表2]。
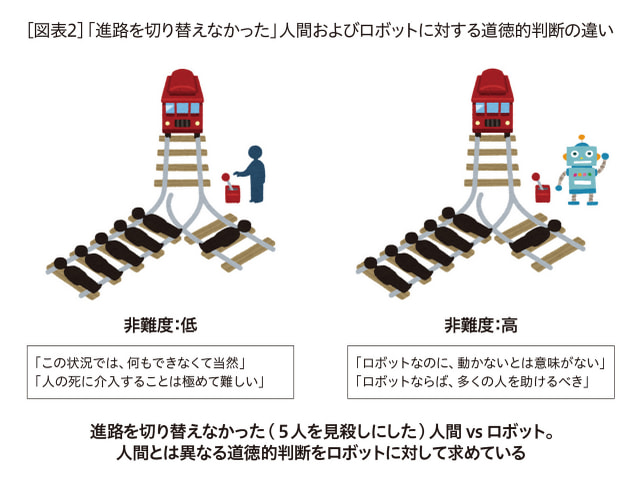
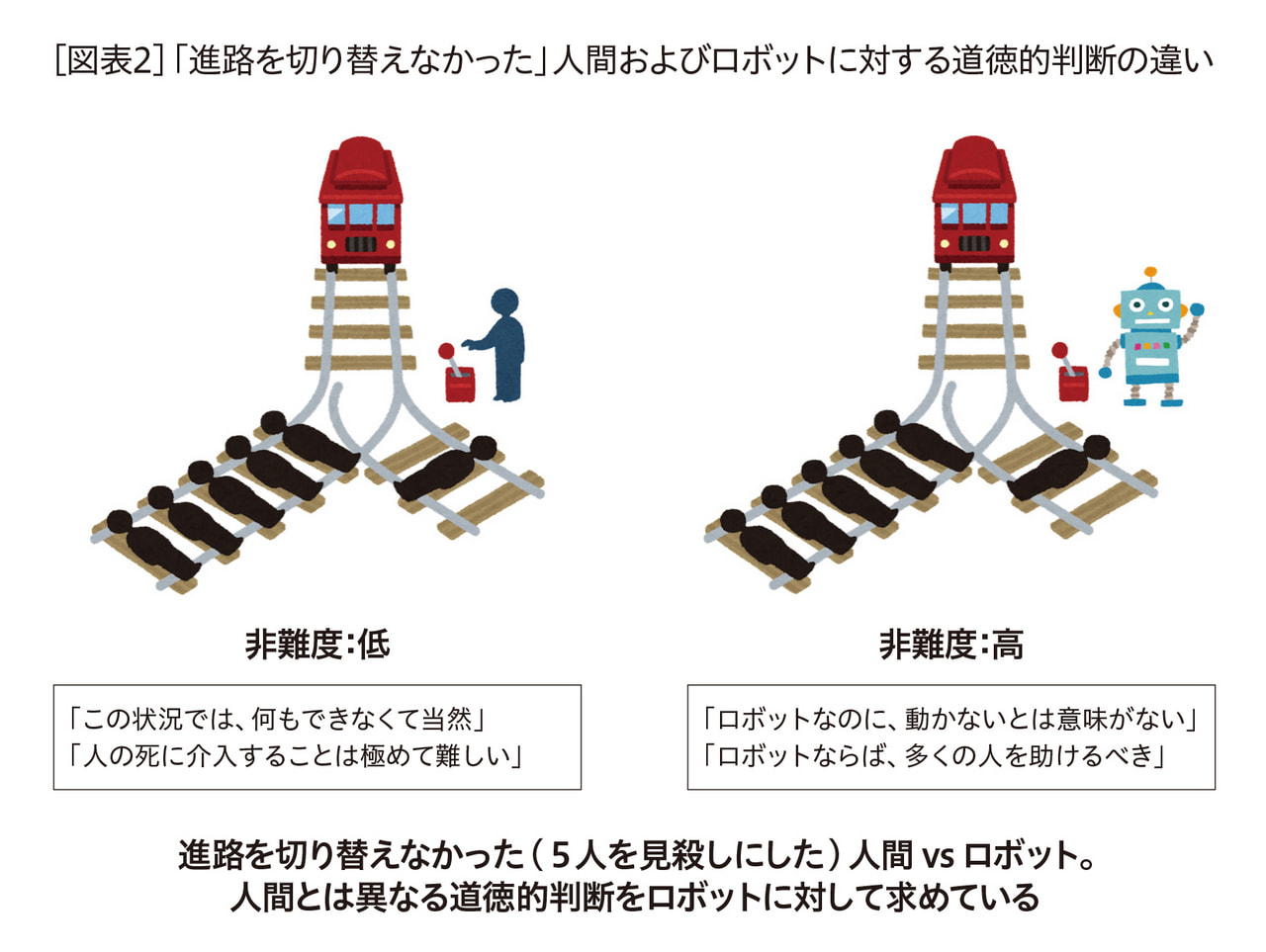
つまり、人間の作業員に対しては「レバーを倒さなくても非難できないよな……」と判断している一方、作業用ロボットに対しては「レバーを倒さないとは何ごとだ!」という異なる判断がなされていることが明らかとなったのです。我々人間が「ロボットに対して人間とは異なる道徳的判断を求めている」ということは、人間はロボットという存在を「我々人間とは異なる価値観を持つ異質なもの」と捉え、それゆえに日常生活への普及を知らず知らずのうちに拒んでいるのかもしれません。
しかしこの調査は、アメリカ国内で実施されたものでした。ロボットに対してあまり抵抗がないと考えられる日本人は、果たしてこのような課題に登場するロボットに対してどのような反応を示すのでしょうか。そこで、同様の調査を日本とアメリカで同時に実施し、この2つの文化圏においてどのような差異が観察されるのかを確認しました [5](日本での調査参加者:811人、アメリカでの調査参加者:518人)。
この調査では、さまざまな観点から日米間の差異を比較するため、先の研究で注目されていた「人間の作業員もしくは作業用ロボットの判断に対する非難度(道徳的非難)」に加えて、以下の2つの観点からの比較も行いました。
まず1点目が「ロボットは道徳的判断をするのに適切な存在なのか(道徳的適格性)」という観点です。例えば、この課題での回答において「ロボットにはこのような難しい判断をする能力はない」「そんな権限はない」「人間に聞くべきだ」といった回答があった場合、この回答者は「ロボットは道徳的判断をするのに適切な存在ではない」と考えていることになります。この割合を知ることで、ロボットに対するそもそもの期待度や許容度のようなものを把握することが可能です。
そして2点目が「人間の作業員および作業用ロボットにどのような行動を求めているのか(道徳的規範)」という観点です。人間社会においては文化圏ごとに、従うべき「規範」が存在しています。例えば、日本では「人前で音をたてて鼻をかむべきではない」、アメリカで「食事中に鼻をすするべきではない」など、それらの多くは「~すべき」「~すべきではない」というカタチで表現されます。
そこでトロッコ問題に登場する作業員もしくは作業用ロボットに対して「~すべき」こと、もしくは「~すべきではない」ことを回答してもらうことで、作業員もしくは作業用ロボットに対してどのような規範を求めているのかを把握することが可能となります。また、方向指示スイッチを使って進路を変更するバージョンのトロッコ問題よりも、より選択に逡巡が起こるとされている、シュート装置バージョンのトロッコ問題を採用しました(シュート装置によって大量の石炭を線路に落とすことができれば暴走列車を止めることができるが、それと同時にシュート装置付近で作業をしている作業員を線路に落として殺してしまう)。
この調査の結果は、以下のようにまとめることができました。
・ 道徳的適格性:日本側参加者のうち18.7%、アメリカ側参加者のうち25.1%が、「ロボットは道徳的判断をするのに適切ではない」と回答しており、その割合には有意差が観察されました。この結果、日本側の参加者のほうが「ロボットは道徳的判断をするのに適切な存在だ」と認めている人の割合が高いということが明らかとなりました。
・ 道徳的規範:日本側では「作業用ロボットはシュート装置で石炭を落とすべき」と回答した人が50.6%、「作業員は石炭を落とすべき」と回答した人が39.7%で、これらの間には有意差が観察されましたが、アメリカ側では「ロボットは石炭を落とすべき」とした人が54.8%、「作業員は石炭を落とすべき」とした人が56.8%で、これらの間には有意差は見られませんでした。日米の比較においては、アメリカ側のほうが「作業員であっても作業用ロボットであっても進路を変えるべき」と考えていた人のほうが有意に多いことが明らかとなりました(日本:44.7%、アメリカ:52.4%)。
・ 道徳的非難:「人間の作業員もしくは作業用ロボットの判断に対する非難度」については、2015年のMalle 教授の調査と全く同じ結果が、日米両国で観察されました。つまり、石炭を落とすという判断をした作業員と作業用ロボットへの非難度には差はありませんでしたが、石炭を落とさない判断をした作業員への非難度は低い値を示した一方、同様の判断をした作業用ロボットへの非難度は高い値を示し、その差は統計的に有意なものであることが確認されました。
このように、ロボットに対する期待度や許容度といった道徳的適格性、さらにはロボットに求めるべき道徳的規範については文化差の影響を受けている一方、実際に下された道徳的判断については文化差の影響がないという興味深い結果が得られました。このことから、2015年にMalle 教授が明らかにした「我々人間はロボットに対して人間とは異なる道徳的判断を求めている」のは、文化差の影響の及ばない「我々人間のロボットに対する普遍的な反応である」と改めて確認されました。よってこの調査で得られた知見は、ロボットに対する私たちが抱く内部モデルを検討する際に組み込むべき重要な知見であると考えられます。
つまり、異なる道徳的規範を有している人間およびロボットという存在が同一空間で共存するということを踏まえた上で、2者間のインタラクションを設計することが求められるのではないでしょうか。人間とロボットとのインタラクションを表現する際、「人間とロボットとが握手」をしている状況がよく描かれますが、まずはこのようなインタラクションが異なる道徳的規範を持つ2者間に成立するのかどうか自体を、慎重に考える必要があるのではと思っています。
人間でも機械でもなく、モノでも生き物でもない
調査その2:テセウスの船パラドクスからロボットとは何者かを考える
「トロッコ問題」を用いた調査により、「我々人間はロボットに対して人間とは異なる道徳的判断を求めている」ことが明らかとなりました。ではそもそも、我々人間はロボットをどのような存在として認識しているのでしょうか? 人間と異なる別の生き物のように認識しているのでしょうか、それともただのモノとして認識しているのでしょうか? この問題に取り組むために、私たちは「テセウスの船パラドクス」に着目し、同一性という観点からロボットが我々人間にどのように認識されているのかについての調査を行いました。「テセウスの船パラドクス」とは、以下のような課題です。
「テセウス」という船がある。この船は歴史ある船で、長い間保存されてきた。しかし、長い間保存されてきたものだから、ダメになってしまう舟板が出てきた。ダメになってしまった舟板は少しずつ新しいものに置き換えられていった。やがて全ての舟板が置き換えられた頃、誰かが「これは本当に『テセウス』なのか」と言い出した。
このように「テセウスの船パラドクス」は、ある物体を構成するパーツが全て置き換えられたとき、過去のそれと現在のそれは「同じそれ」だと言えるのか否か、という同一性の問題を検討する課題です。この課題における物体が「船」だった場合、おそらく多くの人は、ただのモノなら部品の置き換えは起こりうることだから「パーツが置き換えられる前の船とパーツが全て置き換えられた現在の船は『同じ船だ』」と考えるのではないでしょうか。
その一方、この物体が「人間」の場合、その人の身体は替えがきくものではないので「パーツ(臓器など)が置き換えられる前の人間と臓器が全て置き換えられた現在の人間は『同じ人間ではない』」と考えるのでは、と私たちは予測しました。つまり、対象が単なるモノとして認識されている場合には「過去のそれと現在のそれは同一」、対象が生き物のように認識されている場合には「過去のそれと現在のそれは異なる存在」とみなされるという仮説を立てました。
そこで、対象物体として「船」および「人間」をこの課題に登場させた場合に、これらの対象がどのように認識されるのか、さらに対象物体として「ロボット」を登場させた場合、そのロボットがどのように認識されるのかを調査しました[6]。なお、対象が「船」および「ロボット」の場合には、オリジナルのシナリオとほぼ同様のシナリオを使用しましたが、対象が「人間」の場合には、「長く生きている間にだめになった身体の箇所を置き換えた」というシナリオに微調整しました。
本調査には63人が参加し、それぞれの参加者には「船」「人間」「ロボット」が登場する3種類のシナリオ全てを読んでもらい、「全てが新しいパーツに置き換わった対象は以前の対象と同一かどうか」という質問への回答、そしてその理由についての自由記述の2点を記入してもらいました。なお、3種類のシナリオを読む順番は、順序効果を踏まえてカウンタバランスを取りました。
その結果、「全てが新しいパーツに置き換わった対象は以前の対象と同一かどうか」という質問に対して「同一だ」と回答した割合は、対象が「船」の場合は88.9%、「人間」の場合は68.9%となり、対象が「船」の場合、「人間」の場合よりもその回答割合が有意に高いことが明らかとなりました。つまり、対象が単なるモノとして認識されている場合には「過去と現在は同一」、対象が生き物のように認識されている場合には「過去と現在は異なる存在」とみなされるという私たちの仮説が検証されました。
そして、対象が「ロボット」の場合、その回答割合は76.2%となり、対象が「人間」と「船」という場合の中間の値を取っていたことが明らかとなりました。つまりこの結果から、ロボットは「生き物のような存在」でもなく「モノのような存在」でもない曖昧な存在として認識されているとの示唆を得ることができました。
この3つの対象間に見られる関係性は、自由記述欄に書かれたテキスト情報への分析からも確認することができました。具体的には、自由記述欄に書かれた文章で使われている単語が対象によってどう異なるかを可視化することができるテキストマイニングの一手法である対応分析(コレスポンデンス分析)を実施しました。すると[図表3]のように、原点を取り囲んで3つの対象(「船(図の中ではshipという赤い四角)」「人間(human)」「ロボット(robot)」)が正三角形の頂点に相当する位置に配置されていることが確認できました。
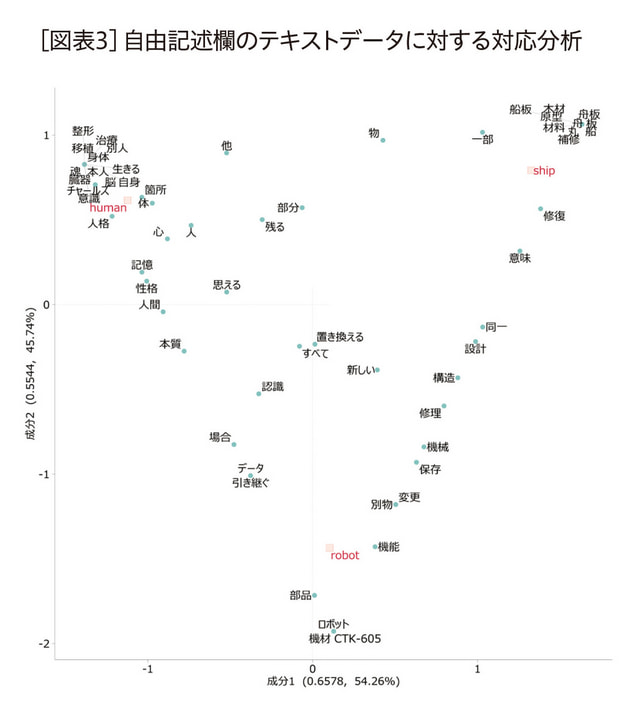
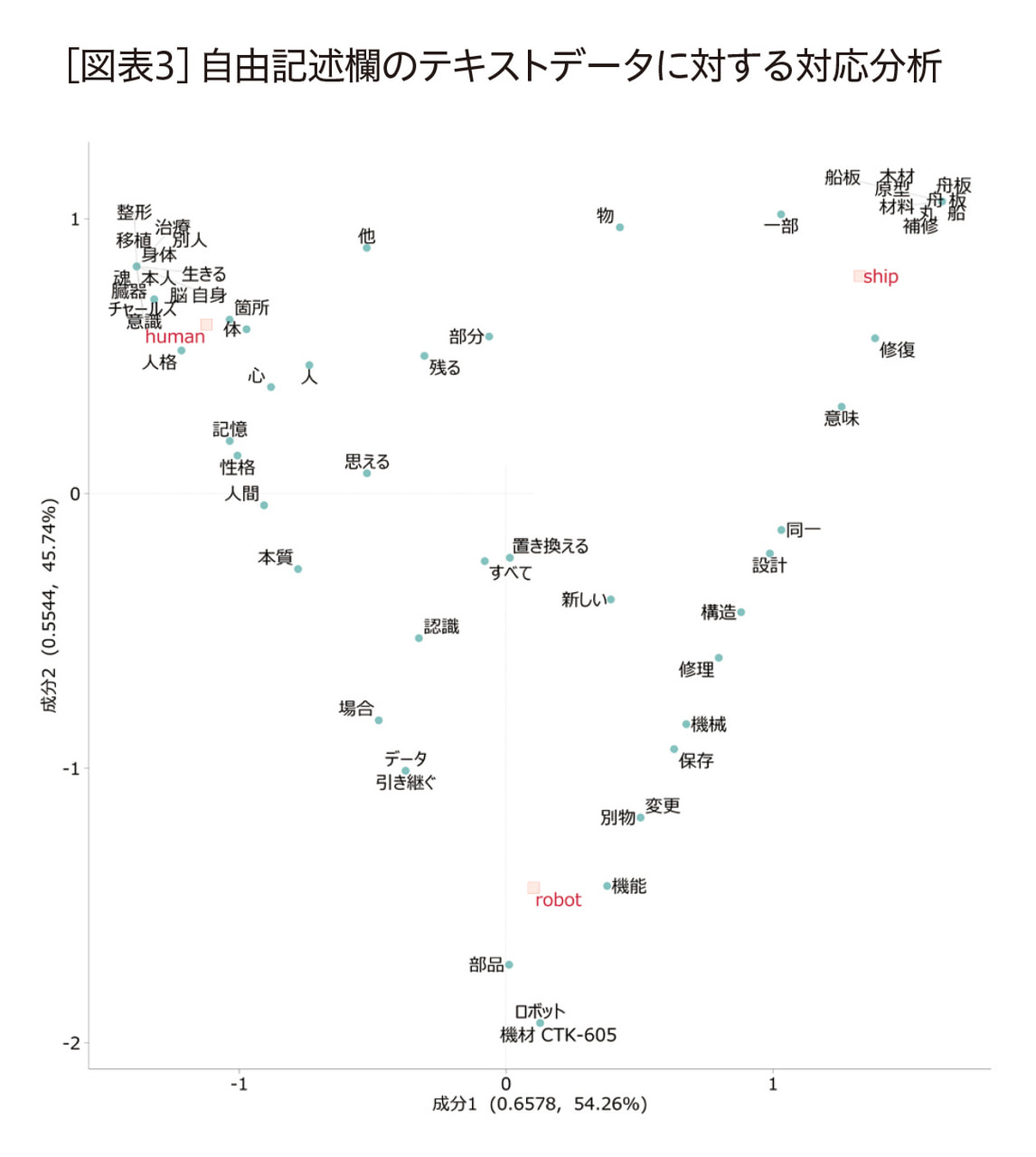
対応分析では、ある対象について記述された内容が他の対象への記述内容と類似していれば、その2つの対象は同じような位置に配置されます。このことから、「船」「人間」「ロボット」という対象は、他の2者とは全く異なる完全に独立した関係に配置されていることとなり、モノ(船)でもなく生き物(人間)でもないという「ロボット」という存在の特異性を改めて確認することができました。また、対応分析においては特徴のない単語が原点付近に配置され、その対象について言及している際に特徴的に使用される単語がその対象付近に配置されます。この観点からこの図を細かく見ていくと、対象が「人間」の場合には「脳」「移植」「人格」といった単語が、「船」の場合には「補修」「材料」「木材」、「ロボット」については「機能」「部品」「機材」という単語が特徴的に使用されていることがわかります。
さらに2つの対象を結ぶ線上に配置されている単語はその2対象共通で使用されている単語です。例えば、「船」と「ロボット」との間には「修理」「同一」「設計」といった工学的な単語が観察され、「人間」と「ロボット」との間には「本質」「認識」「性格」といった心理学的な単語が観察されます。一方、「人間」と「船」との間には、特徴的な単語は見られませんでした。ここから、「人間」と「ロボット」との間には「心理的」な面での類似性が、「ロボット」と「船」との間には「工学的」な面での類似性が、調査参加者によって指摘されていたといえます。つまりこの対応分析による可視化によって、「ロボットは人間でもないし船でもない」「ロボットはモノでもないし生き物でもない」という我々人間のロボットに対する曖昧な認識を明確に示すことができたと私たちは考えています。
おわりに
「なぜロボットは日常生活に普及しないのか」という問題に取り組むため、私たちの研究室では現在、我々人間は「ロボット」に対してどのような内部モデルを構築しているのかを調査しており、今回は一連の研究のうち2つの研究を紹介させていただきました。
1つは「トロッコ問題」にロボットを登場させることで、「我々人間はロボットに対して人間とは異なる道徳的判断を求めている」ということを明らかにした研究、もう1つは「テセウスの船パラドクス」に人、船、ロボットを登場させることで「ロボットはモノでもないし生き物でもない」と認識されていることを明らかにした研究です。これらの研究手法の特徴としては、調査参加者に対して直接的にロボットについての印象などを質問するのではなく、トロッコ問題やテセウスの船パラドクスといったその問題に対する回答を検討するだけでも「ためらい」や「逡巡」が生じ、最終決定に二の足を踏んでしまうようなモラルジレンマ課題やパラドクス課題にロボットを忍ばせることで、ロボットへの印象を暗黙的に把握することを目指したという点です。
このような課題に取り組んでいる際、人の認知資源の多くはその課題自体に割かれ、そこに登場するロボットへの印象形成にはあまり認知資源は割かれない状態になっていると思われます。それゆえに、ロボットという存在に対する「本音」に近い印象が抽出できたのではと私たちは考えています。現在はトロッコ問題やテセウスの船パラドクス以外の思考課題を利用して、ロボットに対する言語化が難しい「本音」を、あらゆる側面から炙り出していくことを計画中です。
これまで、「ロボットと我々の未来」というと、ロボットと人間が社会で共存し、ロボットと人間が友達同士になっているというアニメや映画で描かれるような光景が想像されることが多かったと思います。しかしながら、私たちの一連の研究によって、我々人間はロボットに対して、実は心理的に距離を置くような認識をしていることが明らかとなりました。これらの認識は、私たちの持つロボットに対する内部モデルを構成する重要な構成要素に相当すると考えられます。
よって、これらの構成要素が内部モデル構築の際にどのような役割を果たしているのかを踏まえた上で、どのように具体的なインタラクション方略を設計すればいいのかを検討する必要があります。そのため、これまでの「明るいだけの未来像」とは異なる新たな現実的な未来像を描きながら、これらの問題に取り組んでいく必要があるのではと考えています。
*本文中の[図表1]で紹介した「4枚カード問題」の正解は「A」「5」および「ビール」「16歳」です。
〈注釈〉
( 1 ) https://www.youtube.com/watch?v=VdolSBpyCaU( 2022年10月25日確認)
〈参考文献〉
[1] Cosmides, L., and Tooby, J. (1992). Cognitive Adaptions for Social Exchange, In Barkow, J. (Eds). “The adapted mind: Evolutionary psychology and the generation of culture.” New York: Oxford University Press. 163–228.
[2] Komatsu, T., and Yamada, S. (2020). Exploring Auditory Information to Change Users’ Perception of Time Passing as Shorter, In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems (CHI2020), Paper No 30.
[3] Oshima, H., Komatsu, T., and Yamada, S. (2020). How Throbber Components Affect Users’ Perception of Waiting Time, In Extended Abstract of the 22nd International Conference on Human-Computer Interaction with Mobile Devices and Services (MobileHCI2020) (in late-breakingresults session), Article No. 5.
[4] Malle, B.F., Scheutz, M., Arnold, T., Voiklis, J. and Cusimano, C. (2015). Sacrifice one for the good of many? People apply different moral norms to human and robot a ge n t s . I n Pr o c e e d i n g s o f t h e 1 0 t h AC M / I E E E International Conference on Human-Robot Interaction (HRI2015), pp. 117–124.
[ 5 ] Komatsu, T., Malle, B. F., and Scheutz, M. (2021). Blaming the reluctant robot: Parallel Blame Judgments for robots in moral dilemmas across U.S. and Japan, In Proceedings of the 2021 ACM/IEEE International Conference on Human-Robot Interaction (HRI2021), pp. 63 - 72.